16 雅特力AT32A403开发板评测 16 RTOS移植-FreeRTOS 任务调度测试
16 雅特力AT32A403开发板评测 RTOS移植-FreeRTOS 任务调度管理等应用测试
1. 软硬件平台
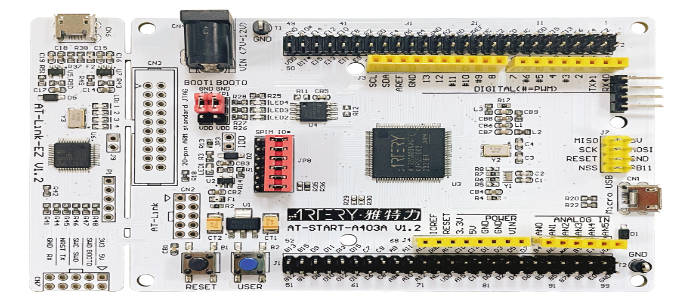
AT32A403A Board开发板
MDK-ARM Keil
FreeRTOS源码
2. FreeRTOS
在嵌入式领域,嵌入式实时操作系统正得到越来越广泛的应用。采用嵌入式操作系统(RTOS)可以 更合理、更高效的利用CPU的资源,简化应用软件的设计,缩短系统开发时间,更好的保证系统的 实时性和可靠性。
FreeRTOS是一个轻量级的实时操作系统内核。作为一个轻量级的操作系统,功能包括:任务管理、 时间管理、信号量、消息队列、内存管理、记录功能、软件定时器、协程等,可基本满足较小系统的 需求。由于RTOS需要占用一定系统资源(尤其是RAM资源),只有UCOSII/III、embOS、RTT、 FreeRTOS等少数实时操作系统能在小RAM的MCU上运行。相对于UCOSII/III和embOS等商用操作 系统,FreeRTOS是免费开源的操作系统,具有源码公开、可移植、可剪裁、调度策略灵活等特点, 可以方便的移植到MCU上运行。
FreeRTOS主要功能和特点如下:
- 用户可配置内核功能
- 多平台的支持
- 提供一个高层次的信任代码的完整性
- 目标代码小、简单易用
- 遵循MISRA-C标准编程规范
- 强大的执行跟踪功能
- 堆栈溢出检测
- 没有限制的任务数量和优先级
- 多个任务可以分配相同的优先权
- 队列、二进制信号量、计数信号量、递归通信和同步的任务
- 优先级继承
系统功能
作为一个轻量级的操作系统,功能包括:任务管理、时间管理、信号量、消息队列、内存管理、记录 功能、软件定时器、协程等,可基本满足较小系统的需求。FreeRTOS内核支持优先级调度算法,不 同任务可根据重要程度的不同被赋予一定的优先级,CPU总是让处于任务就绪、优先级最高的任务 运行。FreeRTOS同样支持时间片轮转调度算法,系统允许不同的任务处于同一优先级下,在没有更 高优先级任务就绪的情况下,同一优先级的任务共享系统资源。 FreeRTOS内核可根据需要设置为可剥夺型内核和不可剥夺型内核。当FreeRTOS配置成可剥夺型内 核时,处于就绪态的高优先级任务能剥夺低优先级任务的CPU使用权,这样提高了系统的实时性; 当FreeRTOS配置成不可剥夺型内核时,处于就绪态的高优先级任务只能等当前任务主动释放CPU使 用权才能获得运行,这样提高了系统的运行效率。
3. AT32官方 FreeRTOS例程
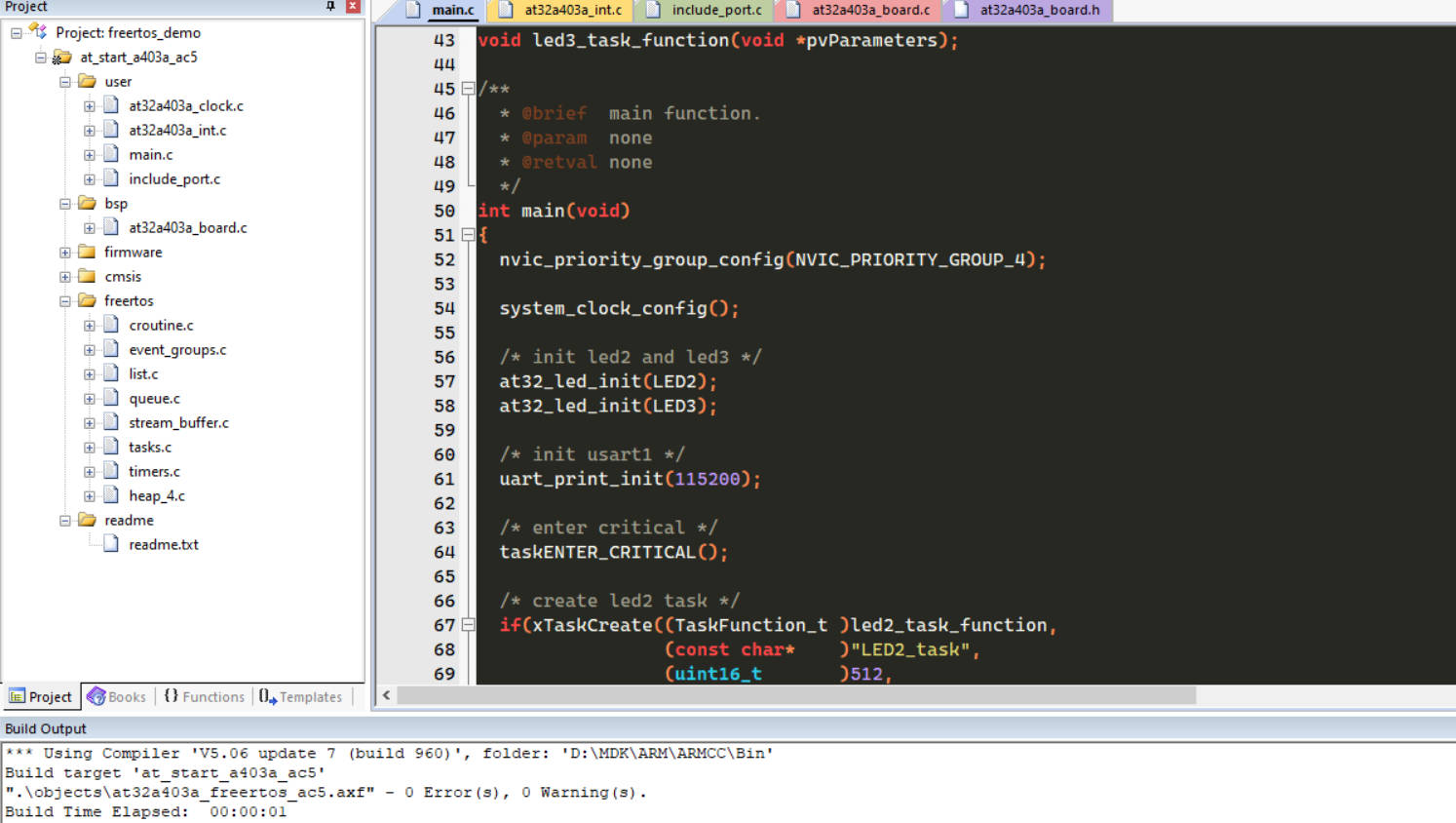
编译代码,正常运行
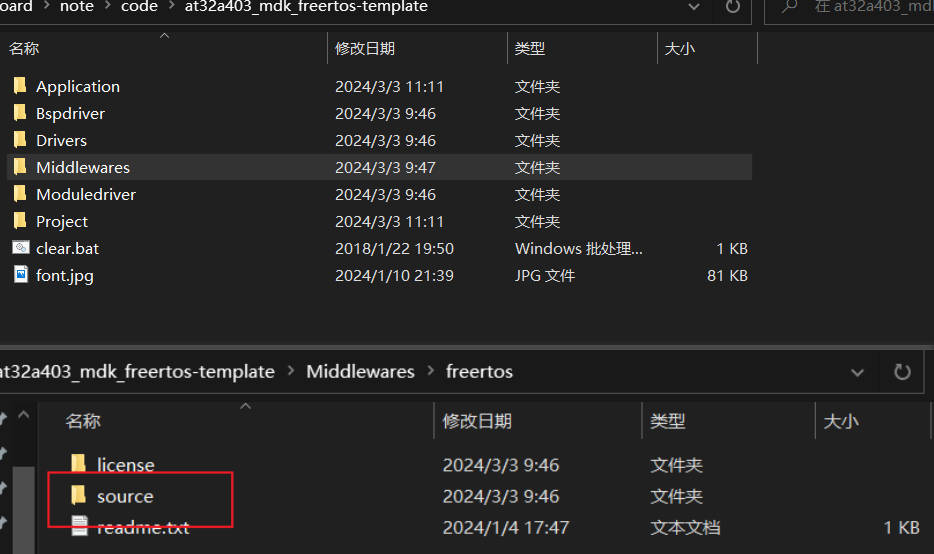
4. AT32A403A-Board开发板移植
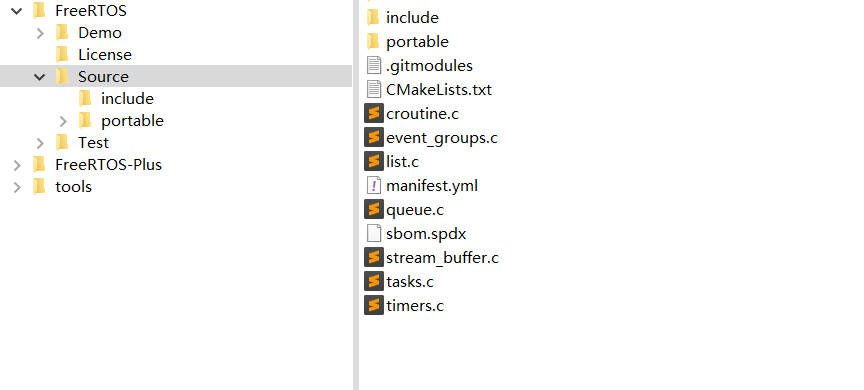
下载FreeRTOS源码

在下载页发现有不少关于FreeRTOS内核的文档,后续学习可以参考

查看下载的压缩包,主要需要的是FreeRTOS内核文件,库文件等(Source,include,portable)
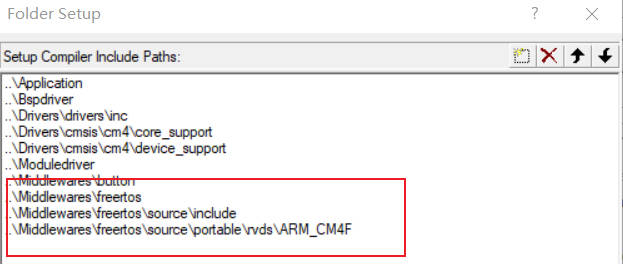
重新建立工程模板,添加FreeRTOS文件夹.
添加FreeRTOS源代码到工程中
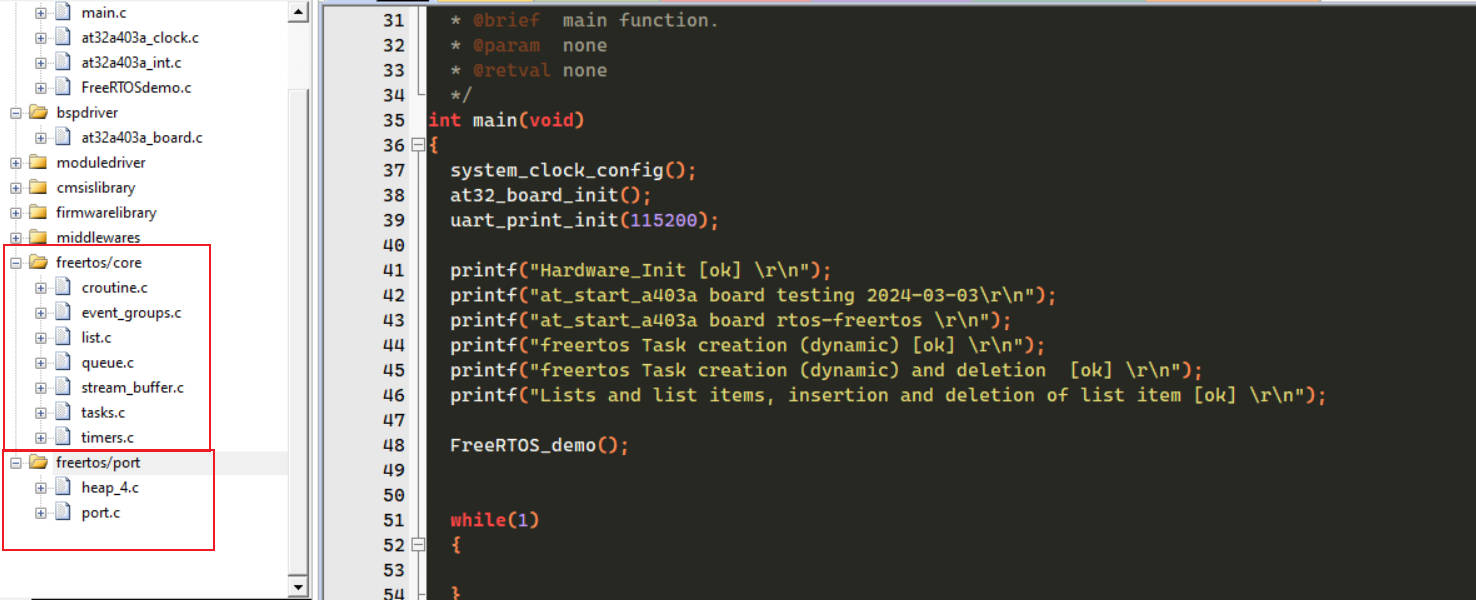
freertos/core 内核源代码 freertos/port 任务调度算法 宏定义文件 不同芯片平台的接口文件(这里使用的Cortex-M4F)
添加库文件路径
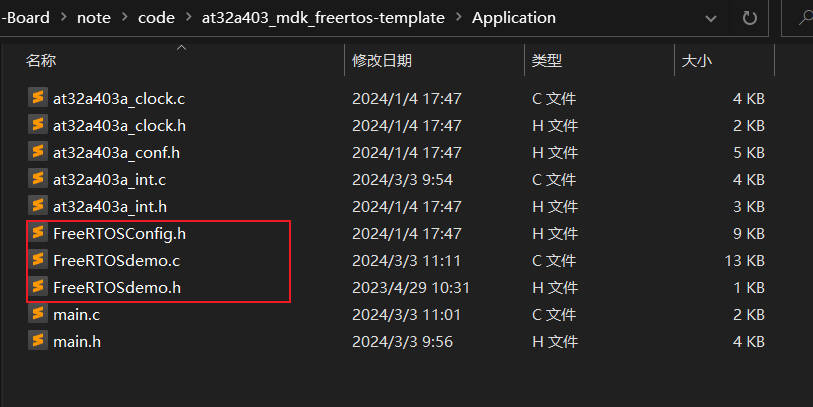
添加FreeRTOSConfig.h配置文件
4.编写程序,任务调度管理等应用测试验证
- 任务创建与调度测试
#include "main.h"
//--------------------------------------------------------------------------------------------------
// 自定义 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9
//--------------------------------------------------------------------------------------------------
#define Delete_Task 1 //测试任务删除API
#define Suspend_Resume_Task 0 //测试任务挂起与恢复API
#define NULL 0
//--------------------------------------------------------------------------------------------------
// FreeRTOS相关定义 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9
//--------------------------------------------------------------------------------------------------
/******************************************************
* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);
/******************************************************
* led1_task 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define LED1_TASK_PRIO 2
//任务堆栈大小
#define LED1_STK_SIZE 128
//任务句柄
TaskHandle_t LED1Task_Handler;
//任务函数
void led1_task(void *pvParameters);
/******************************************************
* led2_task 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define LED2_TASK_PRIO 3
//任务堆栈大小
#define LED2_STK_SIZE 128
//任务句柄
TaskHandle_t LED2Task_Handler;
//任务函数
void led2_task(void *pvParameters);
//开始任务任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建LED0任务
xTaskCreate((TaskFunction_t )led1_task,
(const char* )"led1_task",
(uint16_t )LED1_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED1_TASK_PRIO,
(TaskHandle_t* )&LED1Task_Handler);
//创建LED1任务
xTaskCreate((TaskFunction_t )led2_task,
(const char* )"led2_task",
(uint16_t )LED2_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED2_TASK_PRIO,
(TaskHandle_t* )&LED2Task_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//LED2任务函数
void led1_task(void *pvParameters)
{
//uint32_t task1_num =0;
while(1)
{
//printf("task1_num:%d\r\n",++task1_num);
printf("led1task is Running...\r\n");
at32_led_toggle(LED2);
vTaskDelay(500);
}
}
//LED2任务函数
void led2_task(void *pvParameters)
{
//uint32_t task2_num =0;
while(1)
{
//printf("task2_num:%d\r\n",++task2_num);
printf("led2task is Running... \r\n");
at32_led_toggle(LED3);
vTaskDelay(100);
}
}- 任务动态创建与删除测试
#include "main.h"
//--------------------------------------------------------------------------------------------------
// 自定义 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9
//--------------------------------------------------------------------------------------------------
#define Delete_Task 1 //测试任务删除API
#define Suspend_Resume_Task 0 //测试任务挂起与恢复API
#define NULL 0
//--------------------------------------------------------------------------------------------------
// FreeRTOS相关定义 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9
//--------------------------------------------------------------------------------------------------
/******************************************************
* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);
/******************************************************
* led1_task 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define LED1_TASK_PRIO 2
//任务堆栈大小
#define LED1_STK_SIZE 128
//任务句柄
TaskHandle_t LED1Task_Handler;
//任务函数
void led1_task(void *pvParameters);
/******************************************************
* led2_task 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define LED2_TASK_PRIO 3
//任务堆栈大小
#define LED2_STK_SIZE 128
//任务句柄
TaskHandle_t LED2Task_Handler;
//任务函数
void led2_task(void *pvParameters);
/******************************************************
* key_task 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define KEY_TASK_PRIO 4
//任务堆栈大小
#define KEY_STK_SIZE 128
//任务句柄
TaskHandle_t KEYTask_Handler;
//任务函数
void key_task(void *pvParameters);
///******************************************************
// * float_task 任务 配置
// * 包括: 任务句柄 任务优先级 堆栈大小 创建任务
// *****************************************************/
////任务优先级
//#define FLOAT_TASK_PRIO 4
////任务堆栈大小
//#define FLOAT_STK_SIZE 50
////任务句柄
//TaskHandle_t FLOATTask_Handler;
////任务函数
//void float_task(void *pvParameters);
/******************************************************
* list_task 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define LIST_TASK_PRIO 5
//任务堆栈大小
#define LIST_STK_SIZE 128
//任务句柄
TaskHandle_t LISTTask_Handler;
//任务函数
void list_task(void *pvParameters);
//开始任务任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建LED0任务
xTaskCreate((TaskFunction_t )led1_task,
(const char* )"led1_task",
(uint16_t )LED1_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED1_TASK_PRIO,
(TaskHandle_t* )&LED1Task_Handler);
//创建LED1任务
xTaskCreate((TaskFunction_t )led2_task,
(const char* )"led2_task",
(uint16_t )LED2_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED2_TASK_PRIO,
(TaskHandle_t* )&LED2Task_Handler);
//按键测试任务
xTaskCreate((TaskFunction_t )key_task,
(const char* )"key_task",
(uint16_t )KEY_STK_SIZE,
(void* )NULL,
(UBaseType_t )KEY_TASK_PRIO,
(TaskHandle_t* )&KEYTask_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//LED2任务函数
void led1_task(void *pvParameters)
{
//uint32_t task1_num =0;
while(1)
{
//printf("task1_num:%d\r\n",++task1_num);
printf("led1task is Running...\r\n");
at32_led_toggle(LED2);
vTaskDelay(500);
}
}
//LED2任务函数
void led2_task(void *pvParameters)
{
//uint32_t task2_num =0;
while(1)
{
//printf("task2_num:%d\r\n",++task2_num);
printf("led2task is Running... \r\n");
at32_led_toggle(LED3);
vTaskDelay(100);
}
}
//按键测试任务 判断按键KEY0,按下KEY0删除task1 */
void key_task(void *pvParameters)
{
uint8_t key=0;
#if Delete_Task
while(1)
{
printf("key_task is Running... \r\n");
key = at32_button_press(); //按键扫描
if(key == USER_BUTTON)
{
if(LED1Task_Handler != NULL)
{
printf("delete led1_task... \r\n");
vTaskDelete(LED1Task_Handler);
LED1Task_Handler = NULL;
}
}
vTaskDelay(10);
}
#endif
}- 任务 列表项应用测试
#include "main.h"
//--------------------------------------------------------------------------------------------------
// 自定义 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9
//--------------------------------------------------------------------------------------------------
#define Delete_Task 1 //测试任务删除API
#define Suspend_Resume_Task 0 //测试任务挂起与恢复API
#define NULL 0
//--------------------------------------------------------------------------------------------------
// FreeRTOS相关定义 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9
//--------------------------------------------------------------------------------------------------
/******************************************************
* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);
/******************************************************
* led1_task 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define LED1_TASK_PRIO 2
//任务堆栈大小
#define LED1_STK_SIZE 128
//任务句柄
TaskHandle_t LED1Task_Handler;
//任务函数
void led1_task(void *pvParameters);
/******************************************************
* led2_task 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define LED2_TASK_PRIO 3
//任务堆栈大小
#define LED2_STK_SIZE 128
//任务句柄
TaskHandle_t LED2Task_Handler;
//任务函数
void led2_task(void *pvParameters);
/******************************************************
* key_task 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define KEY_TASK_PRIO 4
//任务堆栈大小
#define KEY_STK_SIZE 128
//任务句柄
TaskHandle_t KEYTask_Handler;
//任务函数
void key_task(void *pvParameters);
///******************************************************
// * float_task 任务 配置
// * 包括: 任务句柄 任务优先级 堆栈大小 创建任务
// *****************************************************/
////任务优先级
//#define FLOAT_TASK_PRIO 4
////任务堆栈大小
//#define FLOAT_STK_SIZE 50
////任务句柄
//TaskHandle_t FLOATTask_Handler;
////任务函数
//void float_task(void *pvParameters);
/******************************************************
* list_task 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*****************************************************/
//任务优先级
#define LIST_TASK_PRIO 5
//任务堆栈大小
#define LIST_STK_SIZE 128
//任务句柄
TaskHandle_t LISTTask_Handler;
//任务函数
void list_task(void *pvParameters);
//开始任务任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建LED0任务
xTaskCreate((TaskFunction_t )led1_task,
(const char* )"led1_task",
(uint16_t )LED1_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED1_TASK_PRIO,
(TaskHandle_t* )&LED1Task_Handler);
//创建LED1任务
xTaskCreate((TaskFunction_t )led2_task,
(const char* )"led2_task",
(uint16_t )LED2_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED2_TASK_PRIO,
(TaskHandle_t* )&LED2Task_Handler);
//按键测试任务
// xTaskCreate((TaskFunction_t )key_task,
// (const char* )"key_task",
// (uint16_t )KEY_STK_SIZE,
// (void* )NULL,
// (UBaseType_t )KEY_TASK_PRIO,
// (TaskHandle_t* )&KEYTask_Handler);
//浮点测试任务
// xTaskCreate((TaskFunction_t )float_task,
// (const char* )"float_task",
// (uint16_t )FLOAT_STK_SIZE,
// (void* )NULL,
// (UBaseType_t )FLOAT_TASK_PRIO,
// (TaskHandle_t* )&FLOATTask_Handler);
xTaskCreate((TaskFunction_t )list_task,
(const char* )"list_task",
(uint16_t )LIST_STK_SIZE,
(void* )NULL,
(UBaseType_t )LIST_TASK_PRIO,
(TaskHandle_t* )&LISTTask_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//LED2任务函数
void led1_task(void *pvParameters)
{
//uint32_t task1_num =0;
while(1)
{
//printf("task1_num:%d\r\n",++task1_num);
printf("led1task is Running...\r\n");
at32_led_toggle(LED2);
vTaskDelay(500);
}
}
//LED2任务函数
void led2_task(void *pvParameters)
{
//uint32_t task2_num =0;
while(1)
{
//printf("task2_num:%d\r\n",++task2_num);
printf("led2task is Running... \r\n");
at32_led_toggle(LED3);
vTaskDelay(100);
}
}
//按键测试任务 判断按键KEY0,按下KEY0删除task1 */
void key_task(void *pvParameters)
{
uint8_t key=0;
#if Delete_Task
while(1)
{
printf("key_task is Running... \r\n");
key = at32_button_press(); //按键扫描
if(key == USER_BUTTON)
{
if(LED1Task_Handler != NULL)
{
printf("delete led1_task... \r\n");
vTaskDelete(LED1Task_Handler);
LED1Task_Handler = NULL;
}
}
vTaskDelay(10);
}
#endif
}
List_t TestList; /* 定义测试列表 */
ListItem_t ListItem1; /* 定义测试列表项1 */
ListItem_t ListItem2; /* 定义测试列表项2 */
ListItem_t ListItem3; /* 定义测试列表项3 */
void list_task(void *pvParameters)
{
vListInitialise(&TestList); /* 初始化列表 */
vListInitialiseItem(&ListItem1); /* 初始化列表项1 */
vListInitialiseItem(&ListItem2); /* 初始化列表项2 */
vListInitialiseItem(&ListItem3); /* 初始化列表项3 */
ListItem1.xItemValue = 40;
ListItem2.xItemValue = 60;
ListItem3.xItemValue = 50;
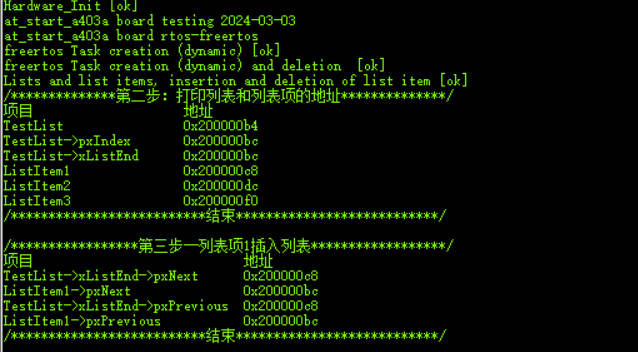
/* 第二步:打印列表和其他列表项的地址 */
printf("/**************第二步:打印列表和列表项的地址**************/\r\n");
printf("项目\t\t\t地址\r\n");
printf("TestList\t\t0x%p\t\r\n", &TestList);
printf("TestList->pxIndex\t0x%p\t\r\n", TestList.pxIndex);
printf("TestList->xListEnd\t0x%p\t\r\n", (&TestList.xListEnd));
printf("ListItem1\t\t0x%p\t\r\n", &ListItem1);
printf("ListItem2\t\t0x%p\t\r\n", &ListItem2);
printf("ListItem3\t\t0x%p\t\r\n", &ListItem3);
printf("/**************************结束***************************/\r\n");
printf("\r\n/*****************第三步--列表项1插入列表******************/\r\n");
vListInsert((List_t* )&TestList, /* 列表 */
(ListItem_t*)&ListItem1); /* 列表项 */
printf("项目\t\t\t\t地址\r\n");
printf("TestList->xListEnd->pxNext\t0x%p\r\n", (TestList.xListEnd.pxNext));
printf("ListItem1->pxNext\t\t0x%p\r\n", (ListItem1.pxNext));
printf("TestList->xListEnd->pxPrevious\t0x%p\r\n", (TestList.xListEnd.pxPrevious));
printf("ListItem1->pxPrevious\t\t0x%p\r\n", (ListItem1.pxPrevious));
printf("/**************************结束***************************/\r\n");
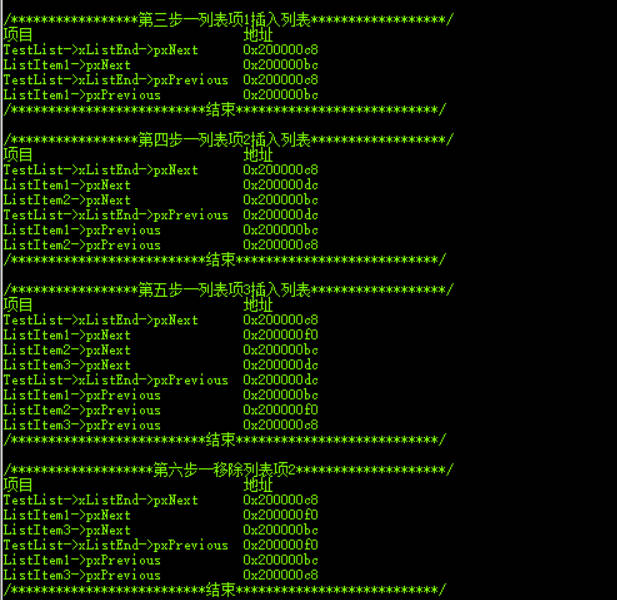
/* 第四步:列表项2插入列表 */
printf("\r\n/*****************第四步--列表项2插入列表******************/\r\n");
vListInsert((List_t* )&TestList, /* 列表 */
(ListItem_t*)&ListItem2); /* 列表项 */
printf("项目\t\t\t\t地址\r\n");
printf("TestList->xListEnd->pxNext\t0x%p\r\n", (TestList.xListEnd.pxNext));
printf("ListItem1->pxNext\t\t0x%p\r\n", (ListItem1.pxNext));
printf("ListItem2->pxNext\t\t0x%p\r\n", (ListItem2.pxNext));
printf("TestList->xListEnd->pxPrevious\t0x%p\r\n", (TestList.xListEnd.pxPrevious));
printf("ListItem1->pxPrevious\t\t0x%p\r\n", (ListItem1.pxPrevious));
printf("ListItem2->pxPrevious\t\t0x%p\r\n", (ListItem2.pxPrevious));
printf("/**************************结束***************************/\r\n");
/* 第五步:列表项3插入列表 */
printf("\r\n/*****************第五步--列表项3插入列表******************/\r\n");
vListInsert((List_t* )&TestList, /* 列表 */
(ListItem_t*)&ListItem3); /* 列表项 */
printf("项目\t\t\t\t地址\r\n");
printf("TestList->xListEnd->pxNext\t0x%p\r\n", (TestList.xListEnd.pxNext));
printf("ListItem1->pxNext\t\t0x%p\r\n", (ListItem1.pxNext));
printf("ListItem2->pxNext\t\t0x%p\r\n", (ListItem2.pxNext));
printf("ListItem3->pxNext\t\t0x%p\r\n", (ListItem3.pxNext));
printf("TestList->xListEnd->pxPrevious\t0x%p\r\n", (TestList.xListEnd.pxPrevious));
printf("ListItem1->pxPrevious\t\t0x%p\r\n", (ListItem1.pxPrevious));
printf("ListItem2->pxPrevious\t\t0x%p\r\n", (ListItem2.pxPrevious));
printf("ListItem3->pxPrevious\t\t0x%p\r\n", (ListItem3.pxPrevious));
printf("/**************************结束***************************/\r\n");
/* 第六步:移除列表项2 */
printf("\r\n/*******************第六步--移除列表项2********************/\r\n");
uxListRemove((ListItem_t* )&ListItem2); /* 移除列表项 */
printf("项目\t\t\t\t地址\r\n");
printf("TestList->xListEnd->pxNext\t0x%p\r\n", (TestList.xListEnd.pxNext));
printf("ListItem1->pxNext\t\t0x%p\r\n", (ListItem1.pxNext));
printf("ListItem3->pxNext\t\t0x%p\r\n", (ListItem3.pxNext));
printf("TestList->xListEnd->pxPrevious\t0x%p\r\n", (TestList.xListEnd.pxPrevious));
printf("ListItem1->pxPrevious\t\t0x%p\r\n", (ListItem1.pxPrevious));
printf("ListItem3->pxPrevious\t\t0x%p\r\n", (ListItem3.pxPrevious));
printf("/**************************结束***************************/\r\n");
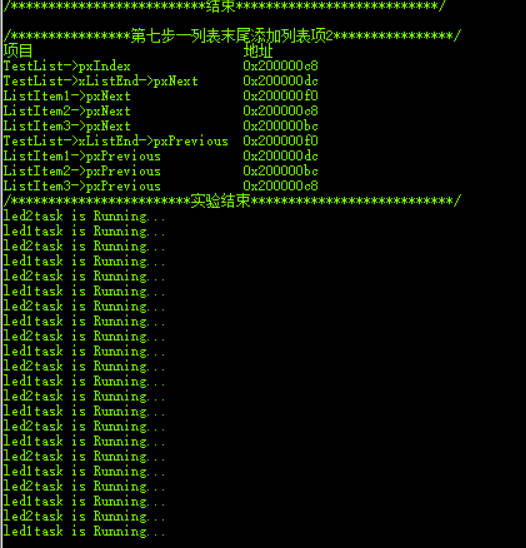
/* 第七步:列表末尾添加列表项2 */
printf("\r\n/****************第七步--列表末尾添加列表项2****************/\r\n");
TestList.pxIndex = &ListItem1;
vListInsertEnd((List_t* )&TestList, /* 列表 */
(ListItem_t* )&ListItem2); /* 列表项 */
printf("项目\t\t\t\t地址\r\n");
printf("TestList->pxIndex\t\t0x%p\r\n", TestList.pxIndex);
printf("TestList->xListEnd->pxNext\t0x%p\r\n", (TestList.xListEnd.pxNext));
printf("ListItem1->pxNext\t\t0x%p\r\n", (ListItem1.pxNext));
printf("ListItem2->pxNext\t\t0x%p\r\n", (ListItem2.pxNext));
printf("ListItem3->pxNext\t\t0x%p\r\n", (ListItem3.pxNext));
printf("TestList->xListEnd->pxPrevious\t0x%p\r\n", (TestList.xListEnd.pxPrevious));
printf("ListItem1->pxPrevious\t\t0x%p\r\n", (ListItem1.pxPrevious));
printf("ListItem2->pxPrevious\t\t0x%p\r\n", (ListItem2.pxPrevious));
printf("ListItem3->pxPrevious\t\t0x%p\r\n", (ListItem3.pxPrevious));
printf("/************************实验结束***************************/\r\n");
while(1)
{
vTaskDelay(1000);
}
}测试效果
主函数
#include "main.h"
void FreeRTOS_demo(void)
{
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
vTaskStartScheduler(); //开启任务调度
}
/**
* @brief main function.
* @param none
* @retval none
*/
int main(void)
{
system_clock_config();
at32_board_init();
uart_print_init(115200);
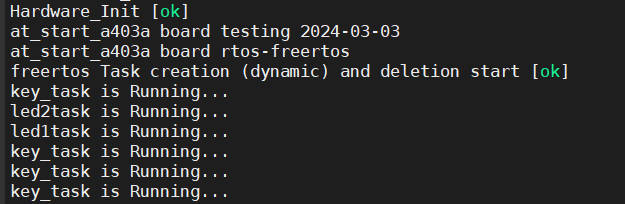
printf("Hardware_Init [ok] \r\n");
printf("at_start_a403a board testing 2024-03-03\r\n");
printf("at_start_a403a board rtos-freertos \r\n");
printf("freertos Task creation (dynamic) [ok] \r\n");
printf("freertos Task creation (dynamic) and deletion [ok] \r\n");
printf("Lists and list items, insertion and deletion of list item [ok] \r\n");
FreeRTOS_demo();
while(1)
{
}
}
测试效果
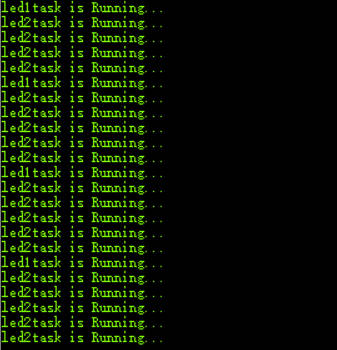
2.1 任务动态创建
2.2 任务动态创建与删除

2.3 任务动态创建 列表项应用